兩名航天員出艙成功。(新華社圖片)
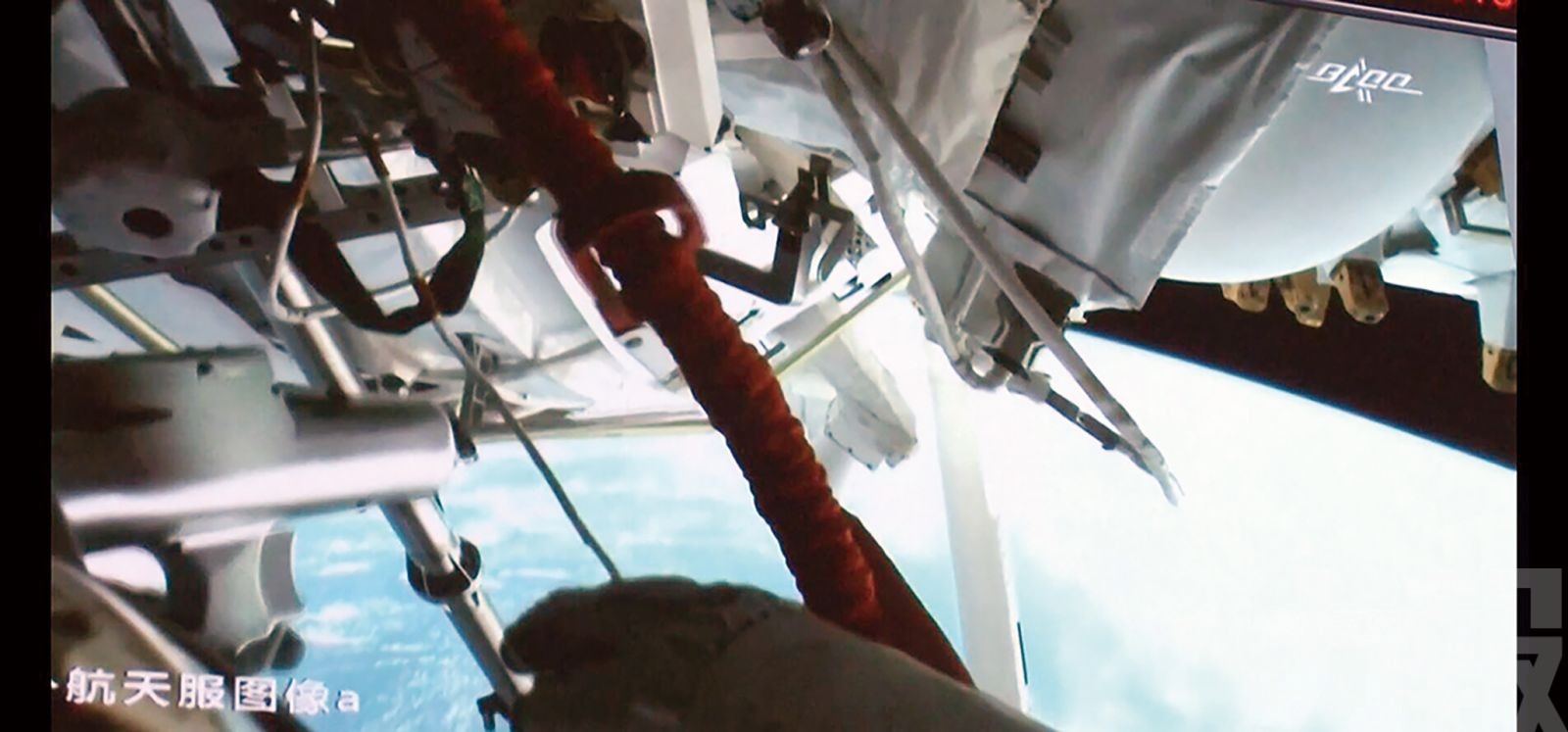
透過航天服上的攝像頭,地面人員可以實時看見艙外組裝工作的情況。 (視頻截圖)

在艙內的航天員聶海勝配合支持兩名出艙航天員開展艙外操作。(新華社圖片)
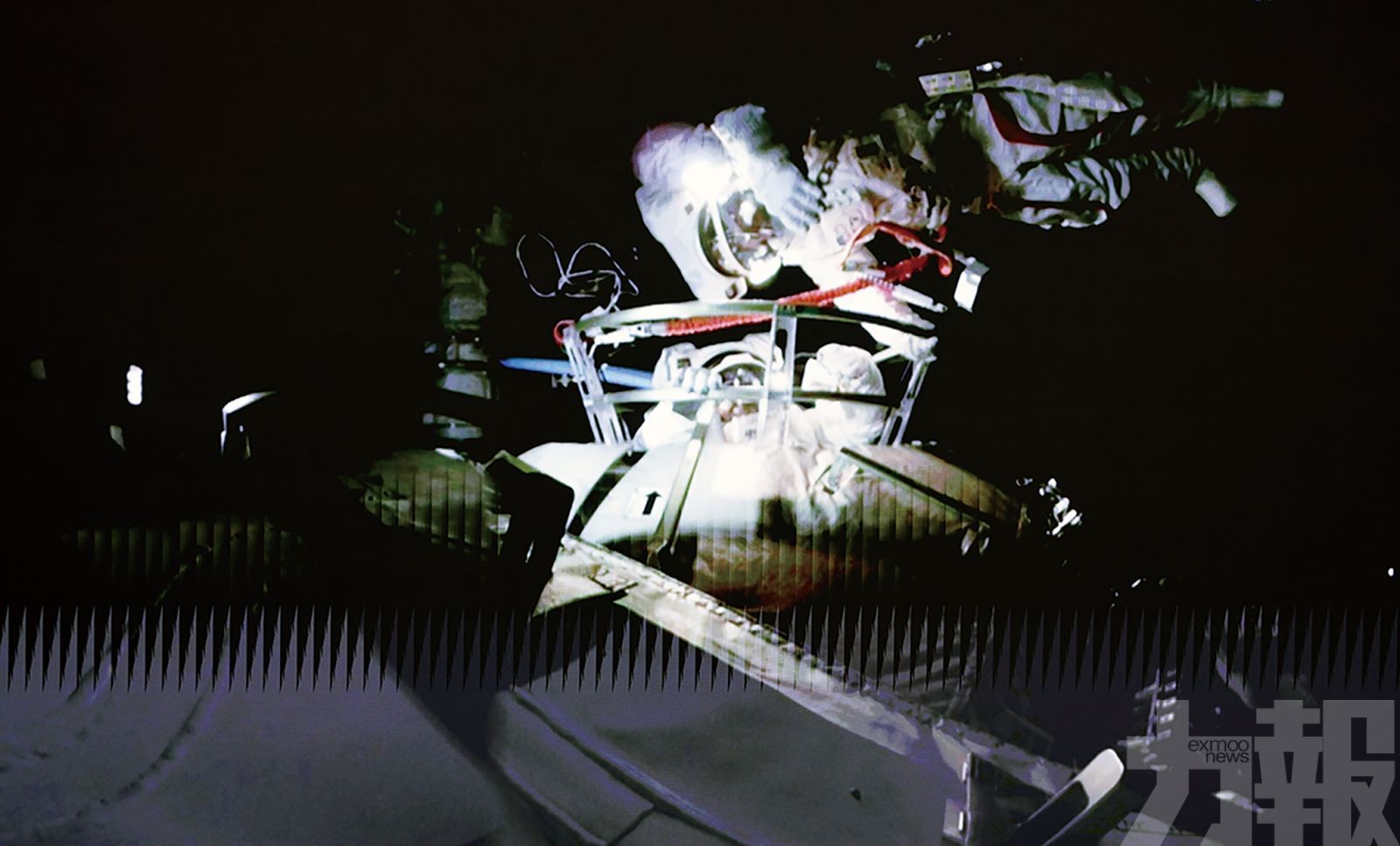
航天員劉伯明需要透過機械臂轉移到工作點,因此如何安全固定 在機械臂上非常重要。 (視頻截圖)
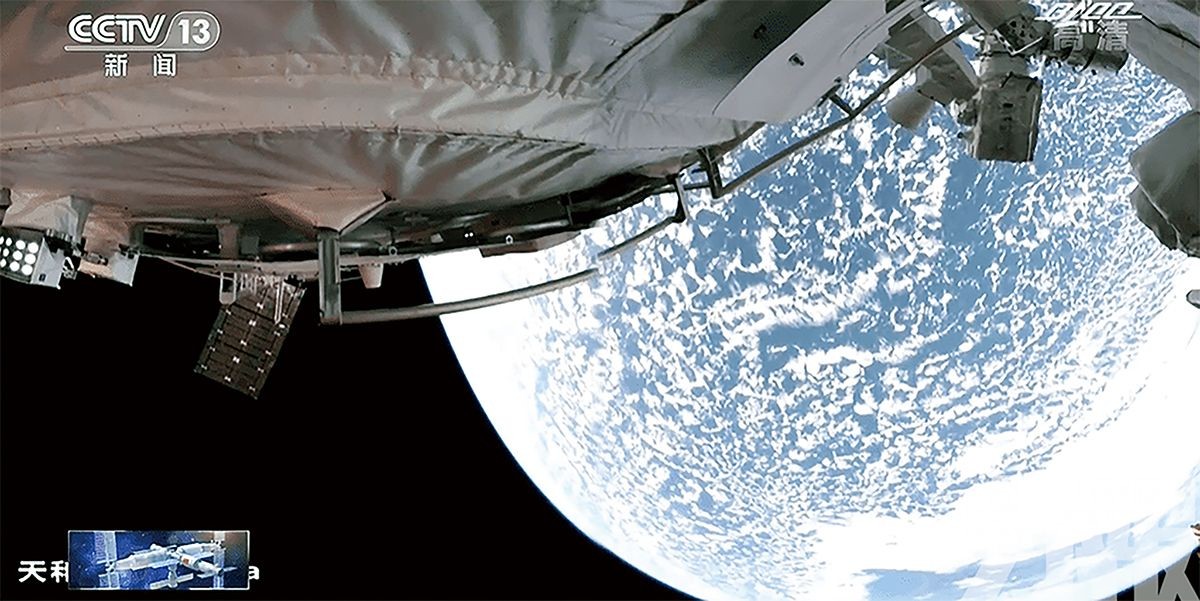
攝像頭拍下太空中的絕美景象。(視頻截圖)

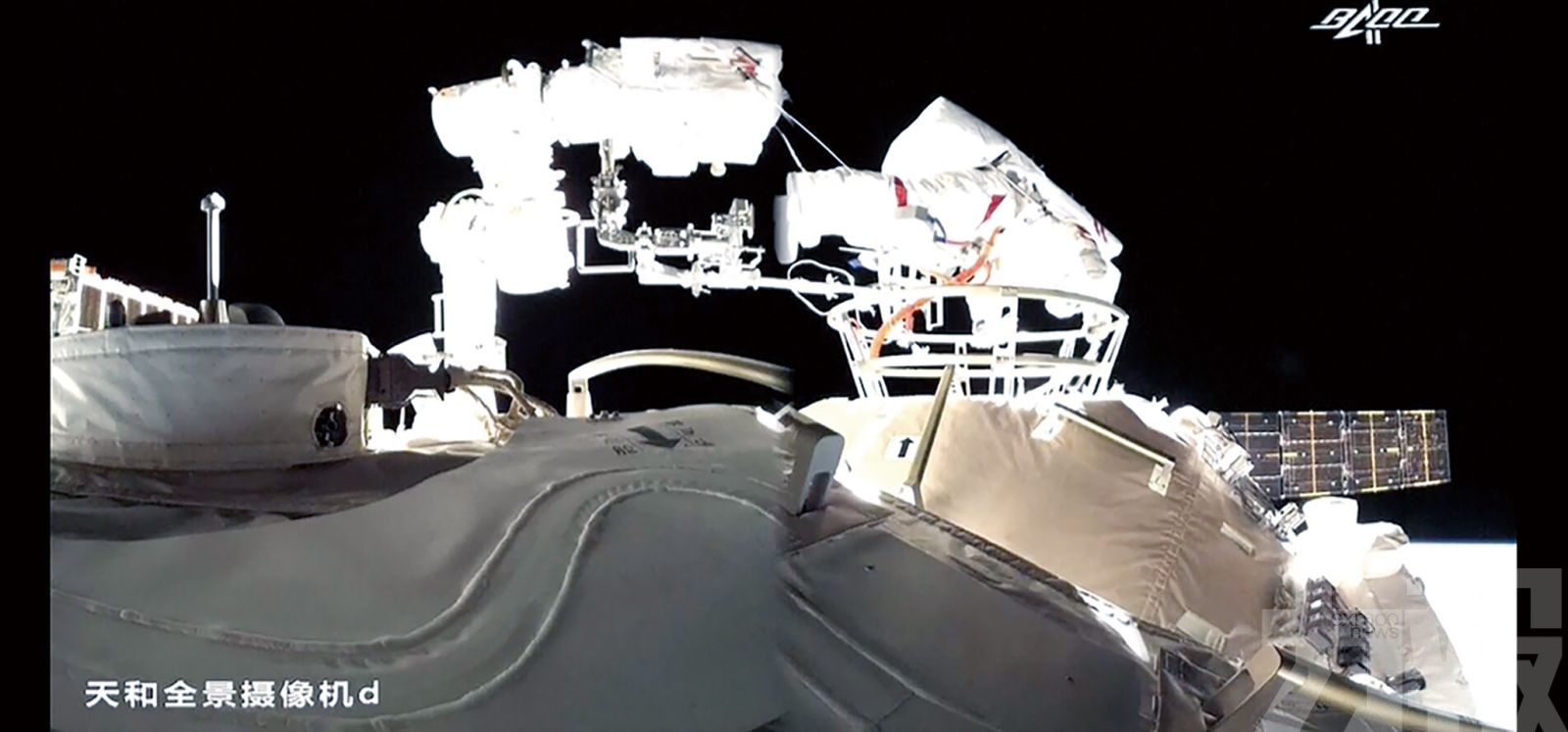
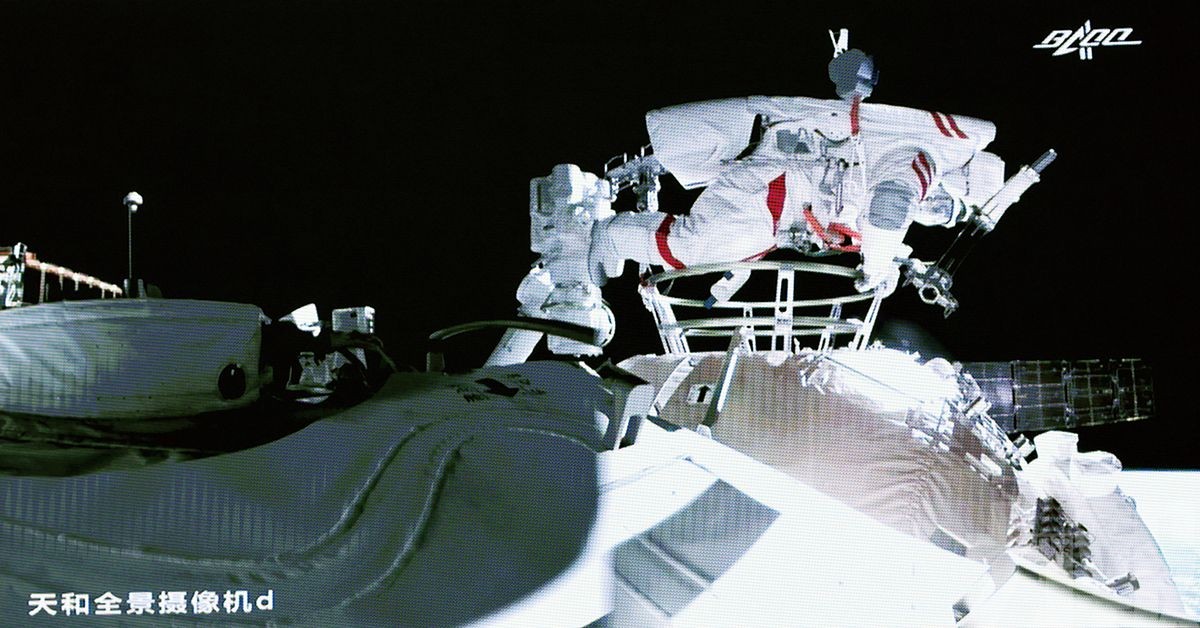
航天員湯洪波藥通過主路徑扶手攀爬製作業點。 (視頻截圖)

首次出艙活動圓滿成功,與天地間、艙內外的大力協同配合密不可分。(新華社圖片)
據中國載人航太工程辦公室消息,北京時間7月4日下午2時57分,經過約7小時的出艙活動,神舟十二號航天員乘組密切協同,圓滿完成出艙活動期間全部既定任務,航天員劉伯明、湯洪波安全返回天和核心艙,標誌著中國空間站階段航天員首次出艙活動取得圓滿成功。
這是繼2008年神舟七號載人飛行任務後,中國航天員再次實施的空間出艙活動,也是空間站階段中國航天員的首次空間出艙活動。
據中國載人航太工程辦公室消息,北京時間昨日上午8時11分,神舟十二號乘組航天員劉伯明成功開啟天和核心艙節點艙出艙艙門,航天員劉伯明、湯洪波身著中國自主研製的新一代「飛天」艙外航太服,先後從天和核心艙節點艙成 功出艙,並已完成在機械臂上安裝腳限位器和艙外工作台等工作,後續將在機械臂支持下,相互配合開展空間站艙外有關設備組裝等作業。期間,在艙內的航天員聶海勝配合支持兩名出艙航天員開展艙外操作。
首次檢驗新一代航太服功能性至下午2時57分,在完成既定艙外活動後,劉伯明、湯洪波安全返回節點艙,航天員關閉節點艙出艙艙門,隨後對節點艙進行檢漏、複壓。艙外航太服也從自主模式轉為艙載模式。待節點艙壓力平衡後,兩名航天員出艙外航太服,隨後打開節點艙與核心艙之間的雙向承壓艙門,最終回到核心艙。
此次出艙活動,天地間大力協同、艙內外密切配合,圓滿完成了艙外活動相關設備組裝、全景相機抬升等任務,首次檢驗了中國新一代艙外航太服的功能性能,首次檢驗了航天員與機械臂協同工作的能力及出艙活動相關支援設備的可靠性與安全性,為空間站後續出艙活動的順利實施奠定了重要基礎。
神舟十二號航天員乘組自6月17日進駐天和核心艙以來,按計劃開展了各項工作,目前三名航天員狀態良好,後續在軌飛行期間還將進行一次出艙活動。
此次出艙為何要數小時?
和2008年那次相比,此次出艙時間為何長達數小時?出艙過程中,機械臂如何助「一臂之力」?為出艙,航天員在地球需要經過怎樣的訓練?
在神舟七號乘組人員執行任務期間,我國在太空開展了第一次艙外活動,總時長約20分鐘。
航太科工二院研究員、國際宇航聯合會空間運輸委員會副主席楊宇光在接受中國之聲《新聞超連結》採訪時解釋稱,那次出艙的主要任務是驗證我國航太服是否可以保證航天員順利出艙。
而此次,我國已進入到空間站關鍵技術驗證階段。未來,航天員將在空間站艙外進行更複雜的科研工作,相當一部分科研任務需要在空間站艙外進行,例如,在研究一些材料或設備時,需要將其放置於外太空條件下以考察這些材料或設備在極端條件下的性能表現。這些也對航太服和出艙活動提出了更高要求。
此外,楊宇光介紹,除了在艙外進行科研工作外,空間站作為極為複雜的系統,航天員還要在艙外對設備進行考察、檢修、維護。從多個方面來看,航天員進行艙外活動都是十分必要和重要的。
因此,為了進行進一步的相關技術驗證,此次出艙時間大幅提升。這也將是空間站建成、運營的重要標誌之一。
機械臂如何助航天員一臂之力?
航天員的艙外航太服上有兩個帶鎖扣的繩子。航天員通過鎖扣的固定、交替移動,實現自身的移動。在過去,航天員需要依靠神舟飛船上設置的扶手在艙體表面進行移動,宇航服的鎖扣與扶手相連,防止航天員飄走。
此次,出艙航天員還可以借助機械臂等外部輔助力量更加自如地進行出艙活動。出艙的航天員被固定在機械臂的一端後,由艙內航天員控制機械臂將艙外的航天員送至指定區域進行作業。
機械臂擁有多個可靈活操作的關節,極大拓展了航天員在艙外的移動範圍。不過,因為,機械臂在運送航天員的過程中可能會使航天員與艙體發生碰撞,碰撞有可能使航太服表面產生破損,造成航太服失壓,威脅艙外航天員的安全。 所以,在操作機械臂時必須進行嚴格監控,機械臂上裝有監視相機,操作人員可通過相機對過程進行即時監測,出現緊急情況可及時停止。
航天員在地球時如何模擬出艙環境?
對此,楊宇光介紹,採用中性浮力水池幫助航天員訓練是國內外進行出艙活動模擬演練的普遍做法。他解釋稱, 中性浮力水池中的水具有一定濃度,密度較高,更為接近失重狀態,水池訓練可以說明航天員掌握借力技巧、增強力量等,以應對失重狀態下下肢無法發力等問題:「這種訓練非常辛苦,在水下的訓練服比真正的航太服更重,使用起來更困難,有報道稱,結束水池訓練的航天員在吃飯時甚至無法正常抬手使用筷子」。
10.2米機械臂 七個關節自由活動 出艙任務的「大力士」
神舟十二號航天員協同合作,外加機械臂的助力,順利完成是次升空首次出艙活動的全部既定任務,已安全返回太空站天和核心艙。據了解,這次出艙任務,航天員劉伯明要在機械臂的輔助下前往作業點,而湯洪波則要通過艙外自主爬行前往作業點。至於聶海勝就留在艙內操控機械臂。
人民網報道指,機械臂展開長度為10.2米,最多能承載25噸的重量, 是太空站任務中的「大力士」。
據航天科技集團五院空間站系統副總設計師柏林厚介紹,作為中國首個可長期在太空軌道運行的機械臂,其肩部設置了三個關節、肘部設置了一個關節、腕部設置了三個關節,總共七個關節。每個關節對應一個自由度,就如同人的手臂一般,具有七自由度的活動能力。
機械臂通過各個關節的旋轉,能夠實現自身前後左右任意角度與位置的抓取和操作,為航天員出艙順利開展出艙任務提供強有力的保証。
刁常堃表示,兩名航天員是採用不同的出艙路徑。
其中主要操作的航天員,他是通過機械臂進行轉移。在出艙之前他會把腳限位器、操作台裝在機械臂上,然後通過機械臂轉移到作業點。而另一個航天員,是通過主路徑扶手,然後攀爬過來的,相當於兩個路徑上都是進行一個驗證。
刁常堃解釋說,在節點艙和小柱段之間會有一個長扶手,長扶手就相當於是一個跨艙的扶手。沿著環形的軸向的扶手,然後一直往下走到大柱段, 可以到達各個需要的維修作業點。
北京時間昨日上午8時11分,神舟十二號航天員劉伯明率先出艙。(新華社圖片)

















